هل من مساعد لي في تجهيز دارة ارسال واستقبال
لقيت الموقع وانا ابحث عن مشروع ارسال واستقبال بالبيك pic16f630
واخيرا لقيت طلبي في موقع
http://www.coolcircuit.com/project/8chrem/
وقمت بتطبيقه على برنامج المحاكاة ولكن لم تعمل الدارة وليس لي خيار بالتعديل على الكود لان الموقع واضعين الكود بلغة الاسمبيلر هل من احد يساعدني في حل مشكلة الدارة او تحويل الكود الى لغة الميكروسي c++
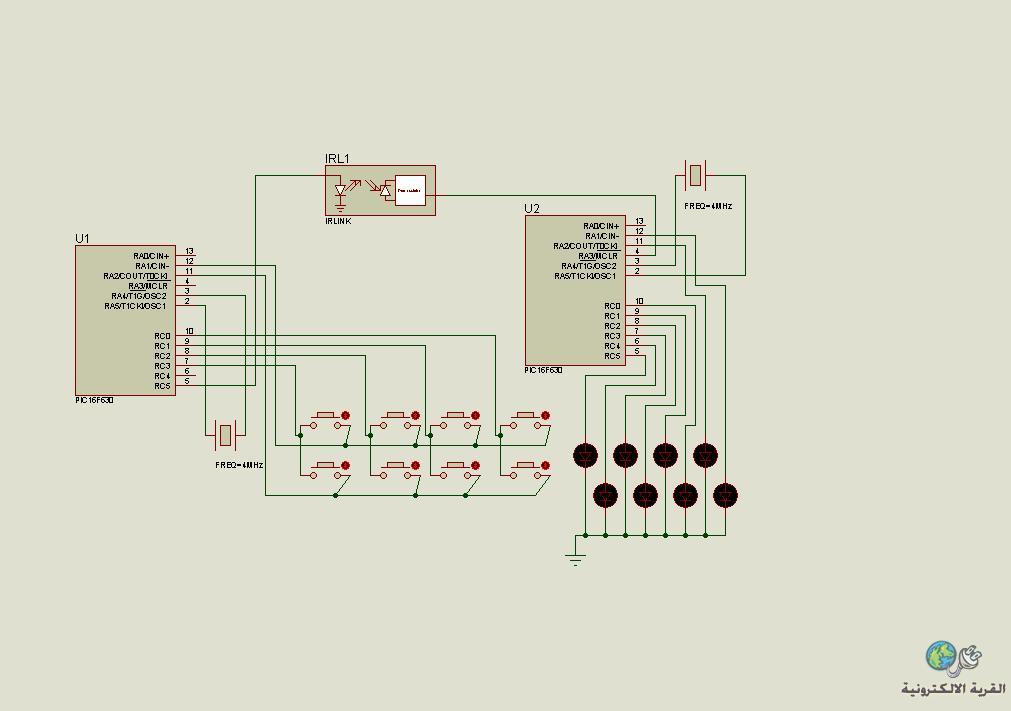 http://upload.qariya.info/images/qar...93bff9fbdc.jpg
http://upload.qariya.info/images/qar...93bff9fbdc.jpg
وكود الارسال :
كود:
;------------------------------------------------------
; PROJECT : 8 CHANNEL TX IR REMOTE
; CRYSTAL 4 MHz
; MPLAB : 7.11 , Assembly
; RC5 FORMAT *38KHz , 35% DUTY CYCLE
; ADDRESS = 0X0b
; CH1 = 0X01
; CH2 = 0X02
; CH3 = 0X03
; CH4 = 0X04
; CH5 = 0X05
; CH6 = 0X06
; CH7 = 0X07
; CH8 = 0X08
; NOT USE TOGGLE ALWAY = 1
; 16 Dec 2005
;
; FREE TO USE FOR PERSONAL OR EVEN COMERCIAL PRODUCT
;------------------------------------------------------
list P=16F630
#include <P16F630.INC>
__config _WDT_OFF & _XT_OSC & _CP_OFF & _BODEN_OFF & _MCLRE_OFF & _PWRTE_ON
#DEFINE IR PORTC,4
#DEFINE TOG_BIT TOGGLE,1 ; TOGLE BIT NOT USE FOR THIS PROJECT
#DEFINE CH1_CMD 0X01 ; CHANNEL 1 COMMAND
#DEFINE CH2_CMD 0X02 ; CHANNEL 2 COMMAND
#DEFINE CH3_CMD 0X03 ; CHANNEL 3 COMMAND
#DEFINE CH4_CMD 0X04 ; CHANNEL 4 COMMAND
#DEFINE CH5_CMD 0X05 ; CHANNEL 5 COMMAND
#DEFINE CH6_CMD 0X06 ; CHANNEL 6 COMMAND
#DEFINE CH7_CMD 0X07 ; CHANNEL 7 COMMAND
#DEFINE CH8_CMD 0X08 ; CHANNEL 8 COMMAND
CNT1 EQU 20H
CNT2 EQU 21H
CNT3 EQU 22H
CNT4 EQU 23H
TOGGLE EQU 24H
CMD EQU 25H ; IR COMMAND BUFFER
PREV_PORTA EQU 26H
Temp EQU 27H
ORG 000
GOTO START
ORG 004H
GOTO ISR
START:
BCF IR
CLRF PORTC
CALL DEBOUNCE
;
MOVLW 0X07
MOVWF CMCON ; MAKE ALL GPIO TO DIGITAL I/O
BSF STATUS,RP0
BCF OPTION_REG,7 ; ENABLE WEAK PULL-UP
BSF WPUA,1 ; ENABLE WEAK PULL-UP FOR RA1
BSF WPUA,2 ; ENABLE WEAK PULL-UP FOR RA2
BSF TRISA,1
BSF TRISA,2
BSF IOCA,1
BSF IOCA,2
CLRF TRISC
BCF STATUS,RP0
BCF INTCON,RAIE
MOVF PORTA,W
BSF INTCON,RAIE
BSF INTCON,GIE
MOVLW 0X00
MOVWF PREV_PORTA
BCF TOG_BIT
;------------------------------------
; MAIN LOOP
MAIN:
SLEEP ; GOTO SLEEP MODE(I a sleepy! and need to save my energy)
GOTO MAIN
;
;======================================
; SEND LOGIC 0
;======================================
LOGIC0: MOVLW .32 ; 1
MOVWF CNT1 ; 1
;
LOG0_1: BSF IR ; 1 MAKE IR HIGH 35% Duty cycle = 9 uS
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
;
;===================================
BCF IR ; 1 MAKE IR LOW 17 uS
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
NOP ; 1
;
DECFSZ CNT1,F ; 1/2
GOTO LOG0_1 ; 2 26 uS
;
CALL DELAY_OFF
RETURN ; 2
;
;======================================
; SEND LOGIC 1
;======================================
LOGIC1: CALL DELAY_OFF ; DELAY 899 uS
MOVLW .32 ; 1
MOVWF CNT1 ; 1
;
LOG1_1: BSF IR ; 1 MAKE IR HIGH 35% Duty cycle = 9 uS
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
;
;===================================
BCF IR ; 1 MAKE IR LOW 17 uS
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
NOP ; 1
;
DECFSZ CNT1,F ; 1/2
GOTO LOG1_1 ; 2
;
RETURN ; 2
;
;======================================
; DELAY FOR NO CARRAIR
; DELAY ABOUT 835 uS
;======================================
DELAY_OFF:
MOVLW 5 ; 1
MOVWF CNT3 ; 1
MOVLW .54 ; 1
MOVWF CNT4 ; 1
DECFSZ CNT4,F ; 1/2
GOTO $-1 ; 2
DECFSZ CNT3,F ; 1/2
GOTO $-5 ; 2
RETURN ; 2
;======================================
; SEND RC5 TO REMOTE
; INPUT : CMD (6 BIT IR COMMAND)
;======================================
SEND_RC5:
; SEND 2 START BIT
CALL LOGIC1
CALL LOGIC1
; SEND TOGGLE BIT
BTFSS TOG_BIT
GOTO $+3
CALL LOGIC1
GOTO $+2
CALL LOGIC0
; SEND ADDRESS 5 BIT FIX AT 01011 (0X0B) IT MAY BE CHANGED BY YOU
CALL LOGIC0 ; 0 MSB FIRST BIT 4
CALL LOGIC1 ; 1
CALL LOGIC0 ; 0
CALL LOGIC1 ; 1
CALL LOGIC1 ; 1 LSB BIT 0
;
; SEND COMMAND 6 BIT(00HH LLLL) MSB FIRST
BCF STATUS,C
RLF CMD,F ; AFTER FIRST ROTAGE 0HHL LLL0
RLF CMD,F ; AFTER SECOND ROTAGE HHLL LL00
;
MOVLW 6
MOVWF CNT2
;
RLF CMD,F ; SEND MSB FIRST
BTFSS STATUS,C
GOTO $+3
CALL LOGIC1
GOTO $+2
;
CALL LOGIC0
DECFSZ CNT2,F
GOTO $-7
;
RETLW 0
;
;======================================
; DEBOUNCE SWITCH
; DELAY 15 mS
;======================================
DEBOUNCE:
MOVLW .1 ; 1
MOVWF CNT1 ; 1
DEL_1: MOVLW .20
MOVWF CNT2 ; 1
DEL_2: CLRF CNT3 ; 1
DEL_3: DECFSZ CNT3,F ; 1/2
GOTO DEL_3 ; 2
DECFSZ CNT2,F ; 1/2
GOTO DEL_2 ; 2
DECFSZ CNT1,F ; 1/2
GOTO DEL_1 ; 2
RETLW 0 ; 2
;=======================================
; INTERRUPT SERVICE ROUTINE
; FOR RA PIN CHANGED
;=======================================
ISR:
BTFSS INTCON,RAIF
GOTO END_ISR
BCF INTCON,RAIE
MOVF PORTA,F
BCF INTCON,RAIF
CALL DEBOUNCE ; DEBOUNCE SWITCH
;
MOVF PREV_PORTA,W
XORWF PORTA,W
XORLW 2
BTFSC STATUS,Z
BTFSC PORTA,1
GOTO ISR2
;
MOVLW 0XFE
MOVWF PORTC
BTFSC PORTA,1
GOTO ISR3
MOVLW 7
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X1
;
ISR3:
MOVLW 0XFD
MOVWF PORTC
BTFSC PORTA,1
GOTO ISR4
MOVLW 5
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X1
;
ISR4:
MOVLW 0XFB
MOVWF PORTC
BTFSC PORTA,1
GOTO ISR5
MOVLW 3
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X1
;
ISR5:
MOVLW 0XF7
MOVWF PORTC
BTFSC PORTA,1
GOTO END_ISR
MOVLW 1
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X1
;
;------------------------------------
ISR2:
MOVF PREV_PORTA,W
XORWF PORTA,W
XORLW 4
BTFSC STATUS,Z
BTFSC PORTA,2
GOTO END_ISR
;
MOVLW 0XFE
MOVWF PORTC
BTFSC PORTA,2
GOTO ISR6
MOVLW 8
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X2
;
ISR6:
MOVLW 0XFD
MOVWF PORTC
BTFSC PORTA,2
GOTO ISR7
MOVLW 6
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X2
;
ISR7:
MOVLW 0XFB
MOVWF PORTC
BTFSC PORTA,2
GOTO ISR8
MOVLW 4
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X2
;
ISR8:
MOVLW 0XF7
MOVWF PORTC
BTFSC PORTA,2
GOTO END_ISR
MOVLW 2
MOVWF CMD
CALL SEND_RC5
GOTO END_ISR_X2
;
END_ISR_X1:
BTFSS PORTA,1
GOTO $-1
CALL DEBOUNCE
GOTO END_ISR
;
END_ISR_X2:
BTFSS PORTA,2
GOTO $-1
CALL DEBOUNCE
GOTO END_ISR
;
;-------------------------------------
;
END_ISR:
;BTFSS PORTA,1
;GOTO END_ISR
;BTFSS PORTA,2
;GOTO END_ISR
CLRF PORTC
MOVF PORTA,W
MOVWF PREV_PORTA
BCF INTCON,RAIF
BSF INTCON,RAIE
RETFIE
END
وكود الاستقبال :
كود:
;--------------------------
; THIS IS RX
; PROJECT :8 channel remote control
; CRYSTAL 4 MHz
; RC5 FORMAT *38KHz , 35% duty cycle
; ADDRESS = 0X0B
; ch1 = 0X01
; ch2 = 0X02
; ch3 = 0X03
; ch4 = 0X04
; ch5 = 0X05
; ch6 = 0X06
; ch7 = 0X07
; ch8 = 0X08
; NOT USE TOGGLE ALWAY = 1
; start date : 16 Dec 2005
;--------------------------
list P=16F630
#include <P16F630.INC>
__config _WDT_OFF & _XT_OSC & _CP_OFF & _BODEN_OFF & _MCLRE_OFF & _PWRTE_ON
#DEFINE IR PORTA,3 ; IR LED input with R10K pull-up to vcc
#DEFINE OUT1 PORTA,2 ; Drive output 1
#DEFINE OUT2 PORTC,0 ; Drive output 2
#DEFINE OUT3 PORTC,1 ; Drive output 3
#DEFINE OUT4 PORTC,2 ; Drive output 4
#DEFINE OUT5 PORTA,1 ; Drive output 5
#DEFINE OUT6 PORTC,5 ; Drive output 6
#DEFINE OUT7 PORTC,4 ; Drive output 7
#DEFINE OUT8 PORTC,3 ; Drive output 8
#DEFINE SP PORTA,0 ; Speaker
#DEFINE OUT1_M 0x01
#DEFINE OUT2_M 0x02
#DEFINE OUT3_M 0x04
#DEFINE TOG_BIT TOGGLE,1
#DEFINE ADDRS 0X0B ; 0000 1011 ; 0000 1110
#DEFINE CH1_CMD 0X01
#DEFINE CH2_CMD 0X02
#DEFINE CH3_CMD 0X03
#DEFINE CH4_CMD 0X04
#DEFINE CH5_CMD 0X05
#DEFINE CH6_CMD 0X06
#DEFINE CH7_CMD 0X07
#DEFINE CH8_CMD 0X08
CNT1 EQU 20H
CNT2 EQU 21H
CNT3 EQU 22H
CNT4 EQU 23H
TEMP EQU 24H
TOGGLE EQU 25H
ADDR EQU 26H
CMD EQU 27H
IO EQU 28H
ORG 000
CLRF PORTA
MOVLW 0X07
MOVWF CMCON ; MAKE ALL GPIO TO DIGITAL I/O
CLRF PORTC
CALL DEBOUNCE
BSF STATUS,RP0
MOVLW 0X01 ; enable RA pull-up AND T0 PRESCALER = 4
MOVWF OPTION_REG
CLRF TRISC
MOVLW B'00001000'
MOVWF TRISA
BCF WPUA,2
BCF WPUA,1
BCF WPUA,0
BCF STATUS,RP0
BCF INTCON,GIE
CLRF IO
;
MAIN:
CALL DELAY3500
CALL GET_RC5
BTFSC STATUS,C
GOTO MAIN
;
MOVF ADDR,W
XORLW ADDRS
BTFSS STATUS,Z
GOTO MAIN ; ADDRESS ERROR
;
BSF SP
CALL DEBOUNCE
CALL DEBOUNCE
CALL DEBOUNCE
CALL DEBOUNCE
BCF SP
;
DECF CMD,W ; DECREATE RANK TO 0-7 ONLY
ANDLW 0X07 ; MASK 3 LSB
ADDWF PCL,F
GOTO DO_CH1
GOTO DO_CH2
GOTO DO_CH3
GOTO DO_CH4
GOTO DO_CH5
GOTO DO_CH6
GOTO DO_CH7
GOTO DO_CH8
DO_CH1:
BTFSC IO,0
GOTO SETIO1
BSF OUT1
BSF IO,0
GOTO MAIN
SETIO1:
BCF OUT1
BCF IO,0
GOTO MAIN
;
DO_CH2:
BTFSC IO,1
GOTO SETIO2
BSF OUT2
BSF IO,1
GOTO MAIN
SETIO2:
BCF OUT2
BCF IO,1
GOTO MAIN
;
DO_CH3:
BTFSC IO,2
GOTO SETIO3
BSF OUT3
BSF IO,2
GOTO MAIN
SETIO3:
BCF OUT3
BCF IO,2
GOTO MAIN
;
DO_CH4:
BTFSC IO,3
GOTO SETIO4
BSF OUT4
BSF IO,3
GOTO MAIN
SETIO4:
BCF OUT4
BCF IO,3
GOTO MAIN
;
DO_CH5:
BTFSC IO,4
GOTO SETIO5
BSF OUT5
BSF IO,4
GOTO MAIN
SETIO5:
BCF OUT5
BCF IO,4
GOTO MAIN
;
DO_CH6:
BTFSC IO,5
GOTO SETIO6
BSF OUT6
BSF IO,5
GOTO MAIN
SETIO6:
BCF OUT6
BCF IO,5
GOTO MAIN
;
DO_CH7:
BTFSC IO,6
GOTO SETIO7
BSF OUT7
BSF IO,6
GOTO MAIN
SETIO7:
BCF OUT7
BCF IO,6
GOTO MAIN
;
DO_CH8:
BTFSC IO,7
GOTO SETIO8
BSF OUT8
BSF IO,7
GOTO MAIN
SETIO8:
BCF OUT8
BCF IO,7
GOTO MAIN
;
;======================================
; READ RC5 Format
; OUTPUT : TOGGLE.7 = TOGGLE BIT
; ADDR = ADDRESS 5 BIT
; CDM = COMMAND 6 BIT
; C = 0 READ OK
; = 1 READ ERROR
;======================================
GET_RC5:
BTFSC IR
GOTO GET_RC5 ; WAIT IR LOW
CLRF TMR0 ; clear timer 0
BCF INTCON,T0IF ; CLR timer 0 flag
;
BTFSC INTCON,T0IF
GOTO ERR1
;
BTFSS IR
GOTO $-3
;
MOVF TMR0,W
;MOVLW 0xC8 ; FOR TEST
MOVWF TEMP
MOVLW 0XFF ; 1020 mS = 255*4
SUBWF TEMP,W
BTFSC STATUS,C
GOTO ERR1 ; ERROR IF Time > 1020 uS
MOVLW 0XC8 ; 800 mS
SUBWF TEMP,W
BTFSS STATUS,C
GOTO ERR1 ; ERROR IF Time < 800 uS (C8h * TM0 Prescaler = 800 uS )
;
BTFSC IR ; Time validate 800uS-1020uS
GOTO $-1 ; WAIT TO LOW (Syn BIT)
CALL DELAY1252 ; DELAY 3/4 BIT LENGHT=1252 uS
;
BTFSS IR
BCF TOGGLE,7
BTFSC IR
BSF TOGGLE,7
;
BTFSS IR
GOTO $+4
BTFSC IR
GOTO $-1
GOTO READ
;
BTFSS IR
GOTO $-1
;====== READ ADDRESS 5 BIT ===========
; READ MSB FIRST
;
READ:
MOVLW 5
MOVWF TEMP ; LOOP COUNTER
CLRF ADDR
;
READ1:
CALL DELAY1252
BTFSS IR
BCF STATUS,C
BTFSC IR
BSF STATUS,C
RLF ADDR,F ; SHIFT LEFT ADDRESS
;
BTFSS IR
GOTO $+4
BTFSC IR ; WAIT LOW
GOTO $-1
GOTO $+3
;
BTFSS IR
GOTO $-1
;
DECFSZ TEMP,F
GOTO READ1
;
;====== READ COMMAND 6 BIT ===========
; READ MSB FIRST
;
MOVLW 6
MOVWF TEMP ; LOOP COUNTER
CLRF CMD
;
CMD1:
CALL DELAY1252
BTFSS IR
BCF STATUS,C
BTFSC IR
BSF STATUS,C
RLF CMD,F ; SHIFT LEFT COMMAND
;
BTFSS IR
GOTO $+4
BTFSC IR
GOTO $-1
GOTO $+3
;
BTFSS IR
GOTO $-1
;
DECFSZ TEMP,F
GOTO CMD1
;
MOVLW 0X3F ; 0011 1111
ANDWF CMD,F
MOVLW 0X1F ; 0001 1111
ANDWF ADDR,F
BCF STATUS,C ; C=0 NO ERROR
RETURN
;
ERR1:
BSF STATUS,C ; C=1 HAVE ERROR
RETURN
;======================================
; DEBOUNCE SWITCH
; DELAY 15 mS
;======================================
DEBOUNCE:
MOVLW .1 ; 1
MOVWF CNT1 ; 1
DEL_1: MOVLW .20
MOVWF CNT2 ; 1
DEL_2: CLRF CNT3 ; 1
DEL_3: DECFSZ CNT3,F ; 1/2
GOTO DEL_3 ; 2
DECFSZ CNT2,F ; 1/2
GOTO DEL_2 ; 2
DECFSZ CNT1,F ; 1/2
GOTO DEL_1 ; 2
RETLW 0 ; 2
;======================================
; DELAY 1.252mS
;======================================
DELAY1252:
MOVLW .1 ; 1
MOVWF CNT1 ; 1
REP_1: MOVLW .5
MOVWF CNT2 ; 1
REP_2: MOVLW .81
MOVWF CNT3 ; 1
REP_3: DECFSZ CNT3,F ; 1/2
GOTO REP_3 ; 2
DECFSZ CNT2,F ; 1/2
GOTO REP_2 ; 2
DECFSZ CNT1,F ; 1/2
GOTO REP_1 ; 2
GOTO $+1
GOTO $+1
GOTO $+1
GOTO $+1
RETURN ; 2
DELAY3500:
MOVLW .1 ; 1
MOVWF CNT1 ; 1
MOVLW .23
MOVWF CNT2 ; 1
MOVLW .50
MOVWF CNT3
DECFSZ CNT3,F ; 1/2
GOTO $-1 ; 2
DECFSZ CNT2,F ; 1/2
GOTO $-5 ; 2
DECFSZ CNT1,F ; 1/2
GOTO $-9 ; 2
RETLW 0 ; 2
DELAY1S:
MOVLW .6 ; 1
MOVWF CNT1 ; 1
MOVLW .0
MOVWF CNT2 ; 1
MOVLW .0
MOVWF CNT3
DECFSZ CNT3,F ; 1/2
GOTO $-1 ; 2
DECFSZ CNT2,F ; 1/2
GOTO $-5 ; 2
DECFSZ CNT1,F ; 1/2
GOTO $-9 ; 2
RETLW 0 ; 2
END
ولكن لم افهم الكود
|














