وعليكم السلام ورحمة الله وبركاته
|
انا مبدئيا مش عارف يعنى ايه حلقه مفتوحه او مغلقع فيا ريت حضرتك توضح لانى اول مره اعمل روبوت ذاتى التحكم
|
الموضوع ببساطة انك في التحكم في الموتور نفسه (مش الروبوت ككل) ما تعتمدش على حساسات تقيس بيها سرعة الموتور أو الموضع بتاعه، يعني مثلا عاوزه يتحرك بسرعة معينة، تديله أمر معين ولو السرعة زادت شوية صغيرين أو نقصت شوية صغيرين مش مشكلة ومش حتأثر كتير ع الأداء، لان في الآخر في الحساسات بتاعة الروبوت نفسه هي اللي حتظبط الليلة
دة اسمه تحكم بالحلقة المفتوحة
أما لو يفرق معاك قوي دقة السرعة، يعني مثلا عاوز لما تقول للموتور اتحرك بسرعة مثلا 800 لفة في الدقيقة يتحرك بالظبط بسرعة 800 لفة في الدقية، ولا يزيدوا ولا يقلوا، يبقى الأفضل انك تقيس سرعة الموتور الفعلية بحيث لو قلت عن 800 لفة في الدقية تزودها ولو زادت عن 800 لفة في الدقيقة تنقصها
دة اسمه تحكم بالحلقة المغلقة، لانك بتقفل حلقة التحكم عن طريق قياس القيمة الفعلية
أظن في التطبيق بتاعك التحكم بالحلقة المفتوحة كافي جدا
|
بالنسبه لنوع الينسور فانا لسه مشترتش بس لقيت النوعين دول واحد ب 3 اسلاك والثانى ب 4 ومعرفش الفرق بينهم بس هم الاثنين نفس المدى تقريبا 3-4 متر زى مقالولى وفيه نوع تانى مداه اقل منهم
|
معنديش معلومات عن السنسور. أهم حاجة تعرفها ان لو القياس أنالوج يبقى لازم المايكروكنترولر يكون عنده مداخل أنالوج
|
بالنسبه للميكروكنترول فانا مش هتفرق 1 او 2 بس انا برجح يكون 1 ومفيش فارق لو كان كبير يعنى زى 16F877A اظن ده كبير وفيه PINS تكفى على حد علمى
بالنسبه للموتور انا كنت هستخدم موتور بتاع لعبه عاديه (لعب اطفال ) اظن هو 3 فولت او 6 فولت وهم 2 واحد للتحكم للامام والخلف والتانى يمين ويسار وممكن ازيدهم على حسب الاحتياجات من وجهه نظر حضرتك
|
هو الفرق الأساسي بين انك تستعمل مايكروكنترولر 1 أو أكتر هو تعقيد النظام وصعوبته
لان الموضوع مش مجرد مايكروكنترولر زيادة حيتبرمج ويتحط، ولكن الاتنين مايكروكنترولر ممكن جدا يحتاجو "يتكلموا" مع بعض، يعني يبعتوا لبعض بيانات وينسقوا شغلهم مع بعض من خلال إشارات
ودة حيعقد النظام من حيث السوفتوير والهاردوير
فأظن ان لو ينفع يبقى مايكروكنترولر واحد يكون أفضل
والمسألة مش مسألة عدد رجول بس، المسألة ان يكون فيه المداخل والمخارج اللي انت عاوزها
فلو حتستعمل موتورين، وحيتحركوا بسرعات مختلفة عن بعض، يبقى المفروض يكون عندك على الأقل 2 مخرج PWM
فلو بصينا على المتحكم 16F877A حنلاقي ان عنده 2 PWM ودة كدة يبقى كافي، لكن لو حتتحكم في كل موتور من ال4 مواتير على حدة (عشان مثلا تتحكم في درجة انحناء المسار وهو بيحود) حيبقى مش كافي
لو عاوز تختار متحكم من مايكروشيب ويكون بمواصفات معينة، استعمل الموقع دة:
http://www.microchip.com/maps/microcontroller.aspx
وحتحدد المواصفات، فتطلعلك قايمة
يعني مثلا في حالتك ممكت تختار مدخلين أنالوج (عشان الحساس)
ولو حتتحكم في 4 مواتير بسرعات مختلفة عن بعض يبقى تختار 4 PWM
وممكن تختار 8 بت فوق عشان ال16 بت وال32 بت بيبقوا أغلى، وعادة العبوة ما بتبقاش PDIP، في أحيان كتير بتبقى تجميع سطحي بعكس ال8 بت اللي كتير منه فيه PDIP، فطبعا الPDIP حيبقى تركيبه أسهل بالنسبة لك
|
انا حاليا بابحث عن دروس استخدامم الترانسيستورات كمفتاح ومكبر الخ... عسان اقدر اتحكم فى الموتور لانها هتسحب باور اكبر من الى الميكرو يقدر يطلعه
|
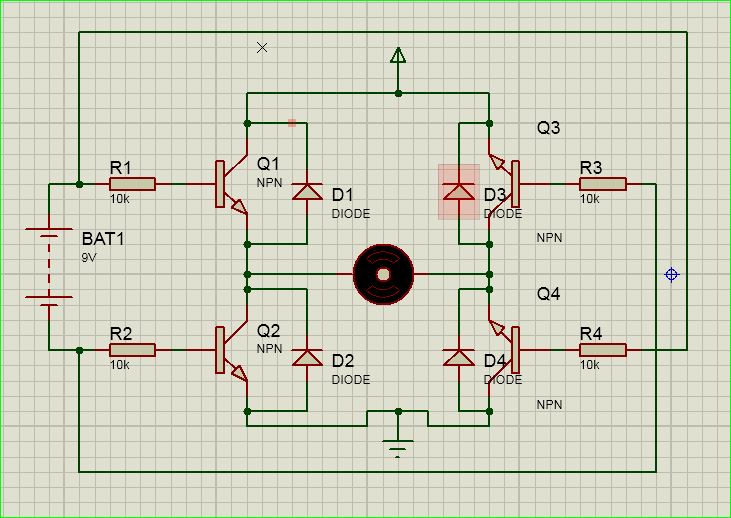
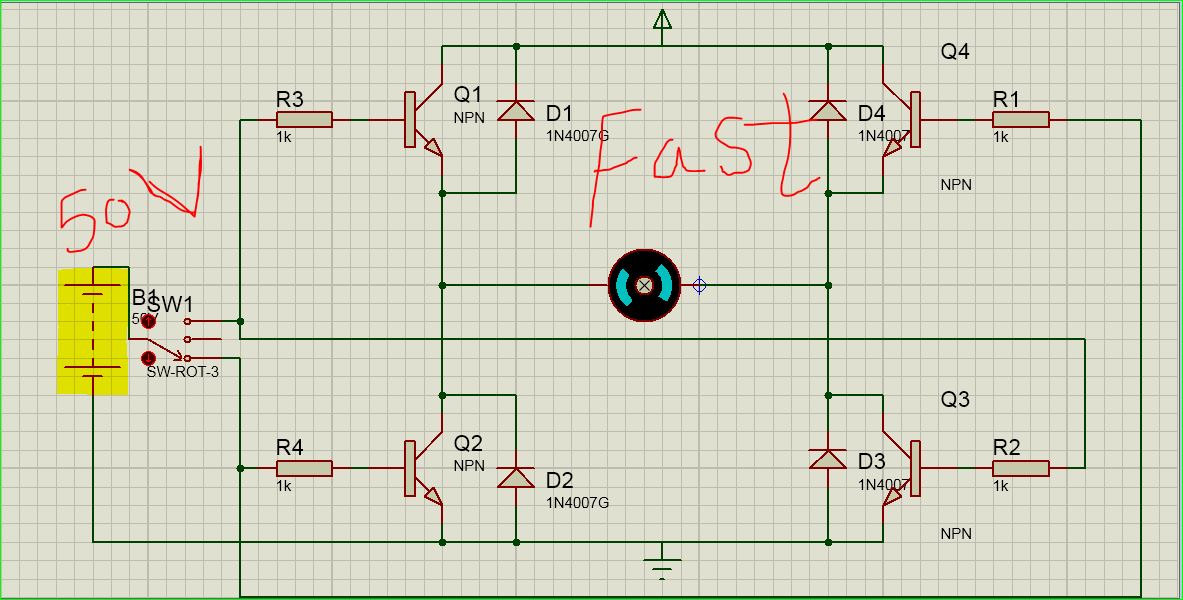
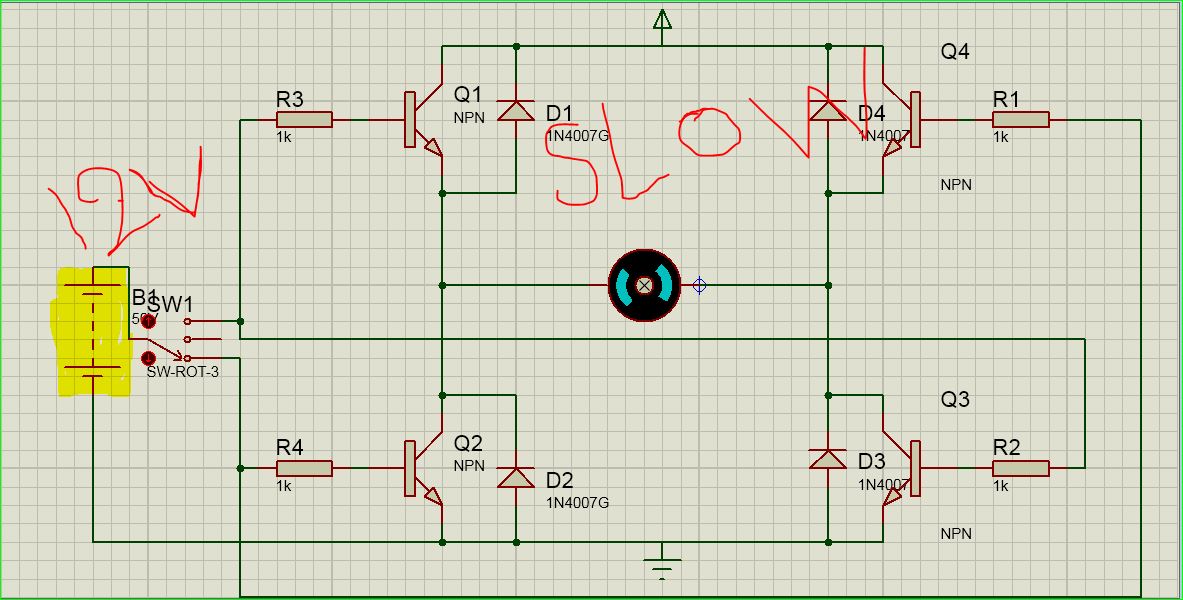
أحسن حل للنقطة دي من وجهة نظري، طالما ناوي تتحكم في سرعة المواتير واتجاهها وغالبا حتستعمل PWM يبقى استعمل القنطرة H واشتري القنطرة دي على شكل متكاملة جاهزة L289، المتكاملة الواحدة بتتحكم بيها في موتورين، يعني لو عندك موتورين حتحتاج واحدة بس ولو عندك 4 مواتير حتحتاج 2 منها، واستعمالها سهل وبسيط (بس حتحتاج تركب عليها شوية دايودات عبيطة) ومتوفرة ورخيصة والأمبير بتاعها أظن انه كافي للتطبيق بتاعك