السلام عليكم ورحمة الله
الأخوة الأفاضل
أضع بين يديكم كل ما يتعلق بالماوس العادي scroll mouse والتي تعمل بالأشعة تحت الحمراء
جمعتها من عدة مواقع
أرجوا أن تكون مفيدة

بسم الله الرحمن الرحيم
الفأرة أو الماوس اختراع سّهل على الناس استخدام أجهزة الحاسب الآلي , خصوصاً بعد ظهور أنظمة التشغيل ذات الواجهات الرسومية التي تحتم استخدام الفأرة ليتم الضغط على مكونات النظام من ملفات و مجلدات و برامج أخرى لتسهيل عملية استخدام الحاسب عوضاً عن كتابة الأوامر و الانتقال من مجلد إلى آخر من سطر الأوامر.
هل تساؤل أحدكم, عمّا يحتويه الماوس من الداخل؟ ما هي مكوناته؟ كيف يعمل؟ كيف يحول حركة اليد إلى تحريك المؤشر في الشاشة؟ الم تفكروا أن عملية تحريك قطعة صلبة و بواسطتها يتحرك المؤشر بالشاشة أمر جميل و مثير للفضول لمعرفة كيف يعمل هذا الجهاز العجيب؟ لنجيب على هذه الأسئلة سوياً.
وظيفة الماوس الأساسية هي تحويل حركة اليد إلى إشارات يفهمها الحاسب كي يقوم بتحريك المؤشر حسب حركة اليد. يتكون الماوس بشكل أساسي من 5 قطع أساسية و هي :
كرة تتحرك بتحرك الماوس نفسه الذي يتحرك بحركة اليد, الكرة في العادة مصنوعة من المطاط المقوى.
يحيط بالكرة 3 قطع تحدد المسار التي تتحرك فيه الكرة ( و بذلك المسار الذي تتخذه اليد), هذه القطع هي على شكل دائري, ملامسة تماماً للكرة, أحد القطع تحدد المسار (س) و قطعة أخرى تحدد المسار )ص) و الثالثة تعتبر قطعة للتوازن ولا دخل لها بتحديد المسار, و توجد أنواع من الماوسات تحتوي على قطعتان فقط. في الصورة التالية ترون القطع التي تحدد المسار الافقي (س).
تلاحظون أنها مستديرة و تحمل فتحات متشابهة و متساوية, عددها في الغالب 36 فتحة تحدد من خلالها المسار بدقة شديدة , حيث إن الدورة الكاملة للكرة تأخذ 360 درجة, و يمكن للفأرة هنا أن تحسب 36 جزء من الدورة الكاملة و تتحسسها.
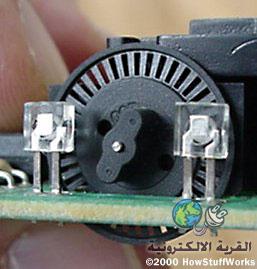
تكون هذه القطع مركبة على اللوحة الالكترونية بطريقة بحيث إن الفتحات تكون في منتصف قطعتين إلكترونيتين. إحداهن ترسل الأشعة تحت الحمراء Infrared أو أضواء LED) Light Emiting Doide) بشكل مستمر, و الثانية تستقبل الأشعة المرسلة, ترون في الصورة التالية توضيحاً للقطع المستخدمة.

ترون القطعة البيضاء, وظيفتها إرسال الأشعة تحت الحمراء, و ترون قطعة مشابهة في الحجم لونها أحمر وظيفتها استقبال الأشعة. بينهما هي القطعة المستديرة التي ذكرنا انه بواسطتها يتم تحديد المسار. كما ذكرنا أن القطعة البيضاء ترسل الأشعة بشكل مستمر, و هي مركبة بشكل دقيقة كي تقابل القطعة الحمراء الصغيرة المقابلة لها, بحيث تنتقل الأشعة بسهولة و يسر, حين تمر القطعة السوداء المستديرة ذات الفتحات, فإنها تكسر الأشعة المارة خلالها مع دورانها. عند وصول الأشعة تحت الحمراء إلى الجانب المستقبل لها, فان الدائرة تكتمل و تعطي الرقم الثنائي 1 وحين تدور القطعة المستديرة و تكسر الأشعة المارة فان الدائرة بدورها تنقطع و تحسب رقم صفر ثنائي, هناك معالج في الفأرة يعالج هذه النبضات و الاشارات و يحولها الى إشارات يفهمها الكمبيوتر و يرسلها إليه. تشاهدون في الصورة التالية المعالج الخاص بالفأرة الذي يقوم بتحويل الإشارات التي تكونها الأشعة تحت الحمراء إلى إشارات يفهمها الكمبيوتر ,










 .................................................. ......و نقل اشارة تسلسلية و من ثم ارسالها الى الحاسب الالى عبر الواصلة PS2 .
.................................................. ......و نقل اشارة تسلسلية و من ثم ارسالها الى الحاسب الالى عبر الواصلة PS2 .






