خطوات استخدام برنامج LDmicro :
أولا :كتابة البرنامج :
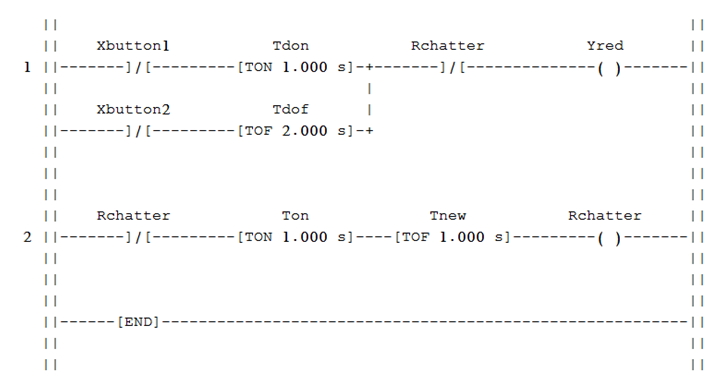
عند بدء البرنامج يبدأ ببرنامج ، فى الوضع الافتراضى ، وبه سطر (درجة rung) واحد فارغ . حيث يمكنك إضافة أو إدراج التعليمات اليه . فعلى سبيل المثال يمكنك إضافة مجموعة من التلامسات من القائمة المنسدلة (Instruction > Insert Contacts) فتظهر بالاسم الافتراضى `Xnew' حيث `X' تعنى أن التلامسات سوف ترتبط أو توصل بطرف دخل بالميكروكونترولر . يمكنك تأجيل تخصيص الطرف بعد اختيار الميكروكونترولر وباقى التلامسات .
الحرف الأول فى الاسم يدل على نوع العنصر فعلى سبيل المثال :
• Xname يمثل طرف دخل للميكروكونترولر (أحد أطراف منافذ الدخل والخرج ) .
• Yname يمثل طرف خرج للميكروكونترولر (أحد أطراف منافذ الدخل والخرج ).
• Rname يمثل ريلاى داخلى أى خانة أو بت فى ذاكرة الميكروكونترولر الداخلية .
• Tname يمثل مؤقت ( سواء كان لتأخير التوصيل أو لتأخير الفصل أو متذكر .
• Cname يمثل عداد (سواء كان متزايد أو متناقص ) .
• Aname يمثل قراءة لقيمة من دخل محول من أنالوج الى رقمى A/D .
• Name يمثل متغير استخدام عام .
يتم اختيار باقى الاسم بحيث يعبر عن ما يفعله العنصر أو الكائن وبحيث يكون فريد أى لا نظير له فى البرنامج . فعلى سبيل المثال ، يكون من الخطأ أن نسمى المؤقت (TON) بالاسم `Tdelay' ثم نسمى المؤقت (TOF) بنفس الاسم `Tdelay' فى نفس البرنامج ، لأن كل مؤقت / عداد يحتاج إلى ذاكرته الخاصة .
ومن جهة أخرى قد يكون ممكنا أن تسمى مؤقت التذكر (RTO) بالاسم `Tdelay' وتعليمة التصفير (RES) المرتبطة بالمؤقت `Tdelay' أيضا لأنه فى هذه الحالة فانك تريد أن تعمل كلتا التعليمتان بنفس المؤقت .
أسم المتغير يمكن أن يتكون من حروف وأرقام والشرطة السفلية (_) ، ولكنه يجب أن لا يبدأ برقم . واسم المتغير حساس لنوع الحرف (كبير او صغير ).
تعليمات المتغيرات العامة (MOV, ADD, EQU, etc.) يمكنها أن تعمل على متغيرات بأى اسم . وهذا يعنى أنها تقبل أو تسمح بالتعامل مع المؤقت والعداد . وهو ما قد يكون مفيدا أحيانا . فعلى سبيل المثال يمكنك اختبار أو فحص اذا ما كان العداد أو المؤقت عند حالة أو مدى معين .
المتغيرات دائما تكون عدد من 16 bit. وهذا يعنى أنه يمكنه أخذ القيم من -32768 الى 32767 ، تعامل المتغيرات باشاراتها . فيمكنك تحديد قيم بالحرف مثل الاعداد العشرية (0, 1234, -56) ، كما يمكنك تحديد قيم على شكل حروف أسكى ASCII مثل ('A', 'z') بوضع الحرف بين الاقواس المفردة المبينة .
• أسفل الشاشة سوف ترى قائمة بكل الكائنات الموجودة بالبرنامج . وهذه القائمة تتولد أتوماتيكيا من البرنامج . ولا تحتاج تحديث أو تدخل منك .
• معظم الكائنات لا تحتاج إلى اعداد أو تهيئة .
• الكائنات `Xname' و `Yname' و `Aname' يجب أن تسند او تنسب إلى طرف بالميكروكونترولر .
اولا اختار نوع الميكروكونترولر من القائمة المنسدلة (Settings -> Microcontroller)، ثم خصص أو انسب أطراف الدخل والخرج بالنقر المزدوج على الكائن باقائمة السفلية .
• يمكنك تعديل البرنامج بإدراج أو حذف التعليمات .
المؤشر بالبرنامج يظهر وهو يومض ليبين التعليمة المختارة الحالية ونقطة الإدراج الحالية . فاذا لم يكن يومض اضغط على مفتاح <Tab> أو انقر على التعليمة . الآن يمكنك حذف التعليمة الحالية أو ادراج تعليمة جديدة إلى يمين أو إلى يسار (أى على التوالى مع ) أو فوق أو تحت (أى على التوازى مع ) التعليمة الحالية المختارة .
بعض العمليات لا يسمح بها . على سبيل المثال : لا يسمح بوجود تعليمة إلى يمين الملف coil .
يبدأ البرنامج بمجرد سطر . يمكنك اضافة اسطر من القائمة المنسدلة
Edit > Insert Rung Before/After
يمكنك وضع دوائر فرعية كثيرة ومعقدة على التوازى فى سطر واحد ولكن يكون من الأوضح استخدام عدة أسطر .
• بمجرد كتابة البرنامج يمكنك اختباره بالمحاكاة ثم بعد ذلك ترجمته إلى ملف سداسى عشر HEX .
|