|
:: استاذ و مشرف قسم الالكترونيات ::
تاريخ التسجيل: May 2007
المشاركات: 6,894
|
|
نشاط [ F.Abdelaziz ]
قوة السمعة:335
|
|
 07-01-2020, 06:57 PM
المشاركة 7
07-01-2020, 06:57 PM
المشاركة 7
|
|
 المحركات الخطوية Stepper Motors
المحركات الخطوية Stepper Motors
المحركات الخطوية Stepper Motors
المرجع : كتاب الاردوينو من البداية حتى الاحتراف ، د.م/ حسين وفائى
تتميز المحركات الخطوية بأنها تتحرك على شكل خطوات متقطعة حيث يدور المحور بزاوية محددة مع كل نبضة كهربائية يتلقاها أحد ملفات المحرك من دون أية آلية تغذية عكسية feedback كما في محرك السيرفو، وهذا ما يجعل المحرك الخطوي أبسط وأقل تكلفة. تتغير زاوية دوران المحور تبعا لبنية المحرك الداخلية ولكنها محصورة عموما ما بين °0.9 حتى °90. لذلك تستخدم المحركات الخطوية في التطبيقات التي تتطلب دقة في الحركة مثل طابعات 3D ، والبلوتر plotter، ومحركات الأقراص الصلبة والليزرية، والماسح الضوئي scanner، وآلات CNC والروبوتات.
يتألف المحرك الخطوي من جزأين رئيسيين هما: العضو الدوار rotor، والجزء الثابت stator. العضوالدوار عبارة عن مغناطيس دائم، أما الجزء الثابت فيتألف من عدة ملفات تعمل كمغناطيس كهربائي عندما يمر بها تيار كهربائي. تسبب ملفات المغناطيس الكهربائي إلى أن ينحاز الجزء الدوار عندما يتم شحنها كهربائيا. يتم دفع العضوالدوار بالتناوب مع كل ملف يمر من خلاله تيار كهربائي.
يتغير جهد تغذية المحرك كثيرا تبعا لنوعه فقد يكون محصورا ضمن المجال 3V وحتى 10V . ويتغير أيضا التيار المستهلك فى المحرك عموما حسب المقاومة الخاصة بملفات المحرك .
يمكن إجمال مزايا المحرك الخطوي بما يلي :
• يقدم المحرك الخطوي دقة في تحديد الموقع حيث تصل دقة المحرك الخطوي الجيد إلى 3-5% وهذا الخطأ ليس تراكمي من خطوة إلى الأخرى.
• المحرك الخطوي رخيص التكلفة وسهل الاستخدام.
• المحرك الخطوي له عمر استخدام طويل جدا.
• يحافظ المحرك الخطوي على مكانه عندما لا يتم تطبيق نبضات كهربائية .
• لا يتأذى المحرك الخطوي بزيادة التحميل overloading، ويتوقف عن العمل فقط.
• تمتاز المحركات الخطوية بـعزم torque مرتفع عند السرعات المنخفضة.
العيوب :
• يحدث اهتزاز الرنين Resonance إذا لم يتم التحكم بشكل صحيح.
• عزم منخفض عند السرعات العالية.
• من الصعوبة أن يعمل بسرعات عالية.
• فاعلية (كفاءة) منخفضة Low Efficiency: تستهلك استطاعة أكثر مما تقدمه، لذلك تميل للعمل مع وجود حرارة.
يمكن تصنيف المحركات الخطوية إلى:
• محركات خطوية أحادية القطبية Unipolar.
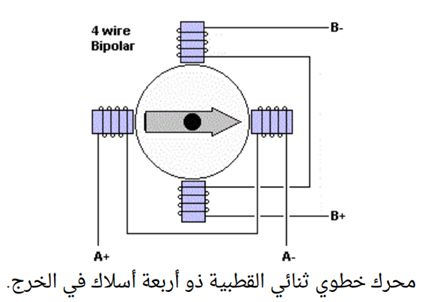
• محركات خطوية ثنائية القطبية Bipolar.
سنتكلم في الفقرات التالية عن المحركات الخطوية التي تتحرك بـخطوة 90 درجة للتبسيط، مع العلم أن المحركات الأخرى لن تختلف عنها كثيرا وخصوصا أثناء قيادتها بلوحة الاردوينو .
المحرك الخطوى أحادى القطبية Unipolar Stepper Motor
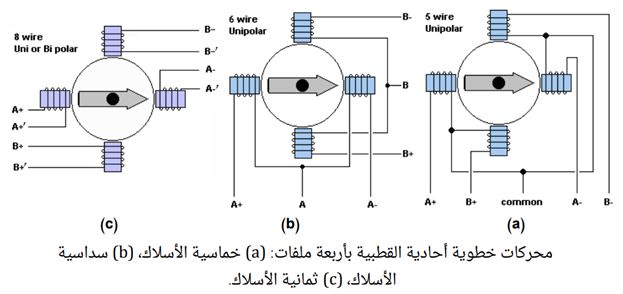
يمر التيار في ملفات المحرك الخطوي أحادي القطبية باتجاه واحد لهذا تم تسميته بهذا الاسم. يتميز بأنه بسيط جدا، ومن مساوئه أن عزمه أقل لأنه لا يمكن تنشيط أكثر من نصف الملفات بنفس الوقت. يخرج من المحرك خمسة أو ستة أسلاك أو ثمانية أسلاك. في المحرك خماسي الأسلاك ترتبط الملفات بأحد أطرافها معا ويخرج منها سلك مشترك، والأسلاك الأربعة المتبقية لأطراف الملفات الأخرى. في المحرك سداسي الأسلاك يتشارك ملفان بأطرافهما بسلك مشترك، والملفان الآخران يتشاركان بسلك مشترك، والأسلاك الأربعة المتبقية لأطراف الملفات الأربعة الأخرى. عند وصل السلكين المشتركين معا سنحصل على محرك خماسي الأسلاك . في المحرك ثماني الأسلاك تكون الملفات مستقلة وكل سلكين في الخرج يمثلان ملف من الملفات الأربعة. يوضح الشكل محركات خطوية أحادية القطبية بأربعة ملفات خماسية وسداسية وثمانية الأسلاك.
يتم تنشيط الملفات الأربعة بطرق مختلفة هي :
• إثارة ملف واحد Wave drive or Single-Coil Excitation .
• خطوة كاملة Full step drive .
• نصف خطوة Half stepping .
• خطوة دقيقة Micro-stepping .
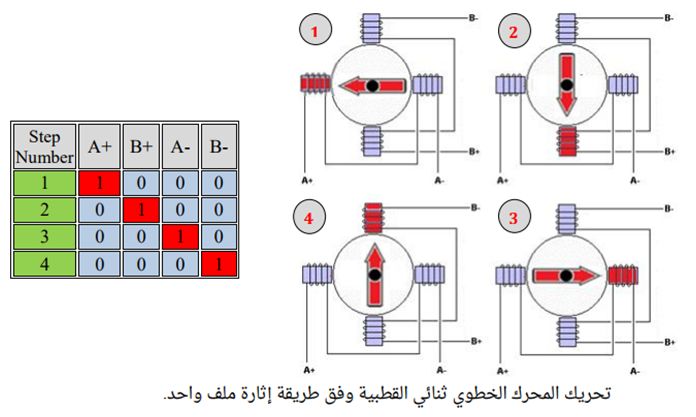
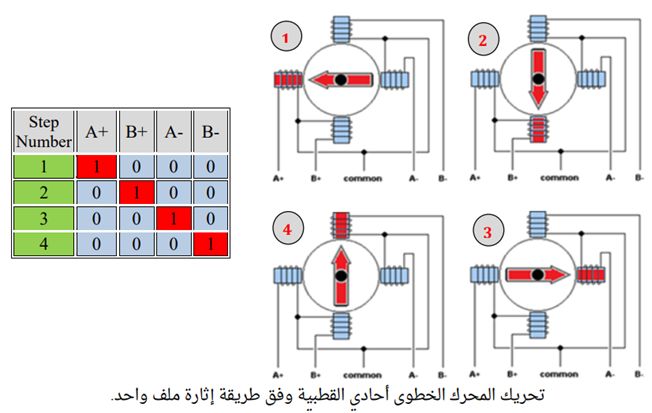
طريقة إثارة ملف واحد:
في هذه الطريقة يتم تطبيق جهد على ملف واحد (تنشيط ملف واحد) في كل مرة. نادرا ما تستخدم هذه الطريقة لأنها تقدم أقل من نصف عزم الدوران الاسمي للمحرك، بالتالي فإن حمولة المحرك لا يمكن أن تكون كبيرة. عموما تستخدم هذه الطريقة لحفظ الطاقة. يتم إتمام دورة كاملة على 4 مراحل. يبين الشكل كيفية عمل هذه الطريقة، والقيم المطلوب تطبيقها على الملفات الأربعة في كل مرحلة.
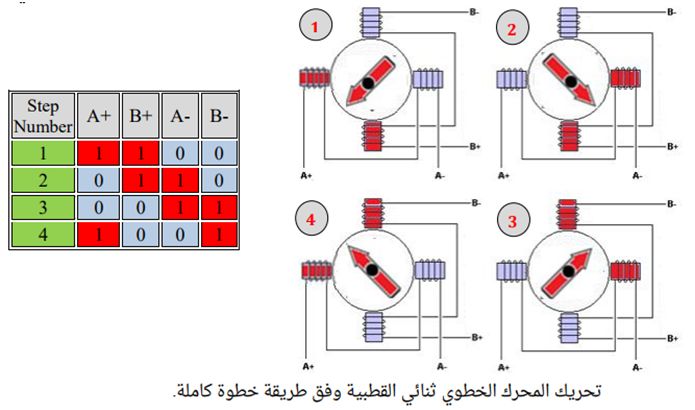
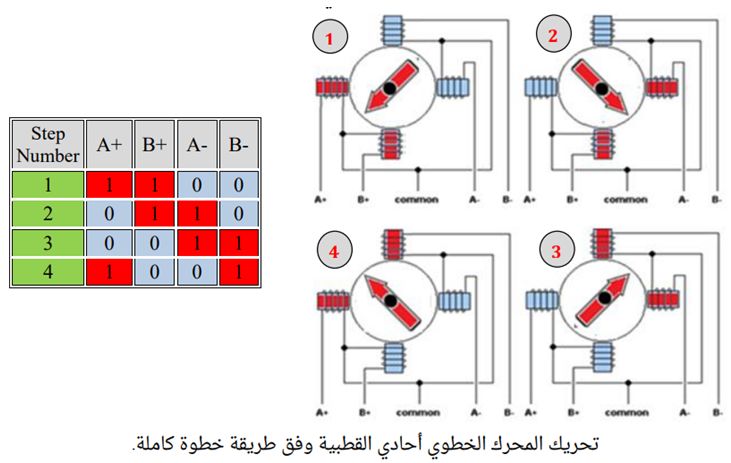
طريقة تحريك بخطوة كاملة:
هذه الطريقة الأكثر استخداما . يتم في هذه الطريقة تطبيق جهد على ملفين (أي تنشيط ملفين) في كل مرة، وهو ما يؤدي إلى الحصول على عزم اسمي كامل (%100) للمحرك. يتم إتمام دورة كاملة على 4 مراحل. يبين الشكل كيفية عمل هذه الطريقة، والقيم المطلوب تطبيقها على الملفات الأربعة في كل مرحلة.
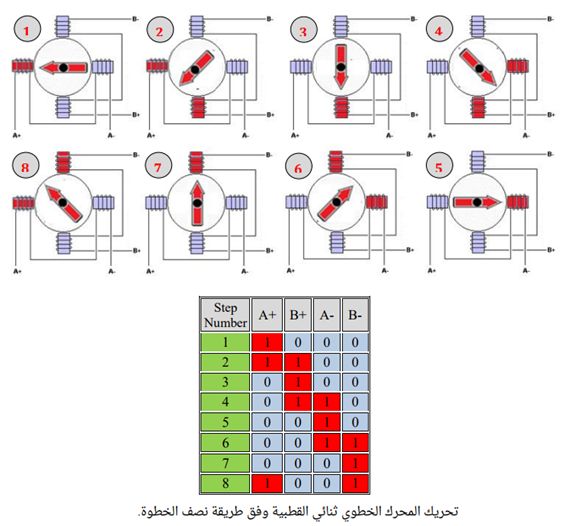
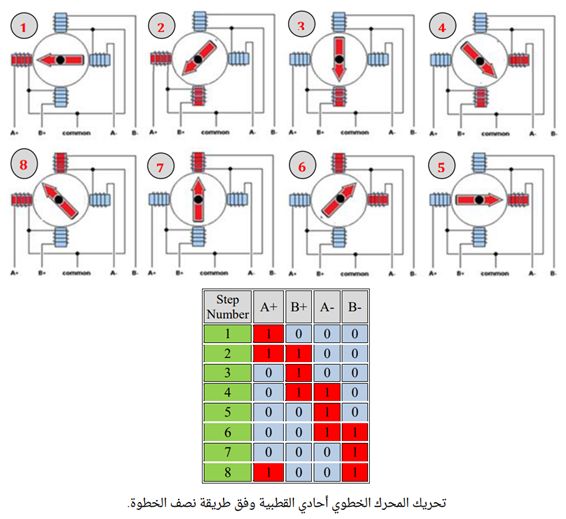
طريقة تحريك بنصف خطوة:
تسمح هذه الطريقة بالحصول على دقة موقع مضاعفة من دون أي تغيير في التركيبية المادية للمحرك، حيث يتحرك المحرك بمقدار نصف خطوة بالمقارنة مع الطريقتين السابقتين. يتم إتمام دورة كاملة على 8 مراحل. يبين الشكل كيفية عمل هذه الطريقة، والقيم المطلوب تطبيقها على الملفات الأربعة في كل مرحلة.
طريقة Microstepping:
لا يتم في هذه الطريقة تغذية الملفات بنبضات وإنما بإشارة تشبه إشارة sin. بهذا الإسلوب يتم الانتقال من خطوة إلى الأخرى بشكل أنعم، وهذا ما يجعل المحرك الخطوي مناسبا للتطبيقات ذات الدقة العالية مثل أنظمة CNC. يدور المحرك الخطوي في هذه الطريقة بشكل مستمر تقريبا مثل محركات DC البسيطة.
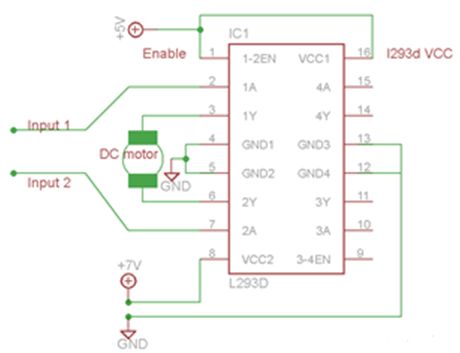
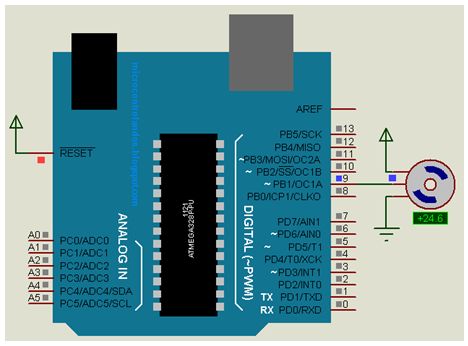
يستجر المحرك الخطوي - كما في محركات التيار المستمر- تيارا لا بأس به لا تستطيع لوحة الاردوينو تأمينه لهذا لابد من استخدام دائرة عزل ما بين المتحكم و المحرك تؤمن له هذا التيار. هناك طرق عديدة يمكن بها تنفيذ دائرة العزل: ترانزستورات أو دائرات متكاملة مثل L293 أو UL2003.
سنستخدم دائرة ULN2003 التي تمتاز برخصها مقارنة مع L293.
الدائرة المتكاملة ULN2003
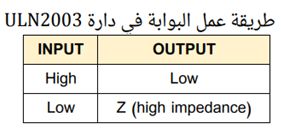
تتكون الدائرة المتكاملة ULN2003 من سبع بوابات التي تتصف بأنها تعمل كمصب للتيار فقط. القيمة العظمى للتيار 500 mA . يوضح الشكل بنية الدائرة ULN2003 وتوز يع أرجلها:
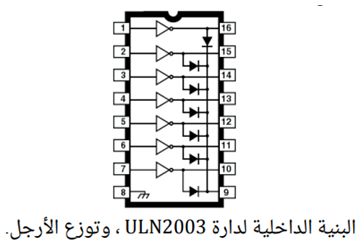
تعمل الأرجل من 1 و حتى 7 كمداخل لبوابات الدائرة، والأرجل من 10 وحتى 16 كمخارج للبوابات. الرجل رقم 8 يتم وصلها إلى الأرضي المشترك. الرجل 9 تتصل مع مهابط ثنائيات، من الممكن عدم وصل هذه الرجل ، أو قد يتم وصلها مع تغذية المحرك كما سنرى لاحقا. يوضح الجدول كيفية عمل البوابة.
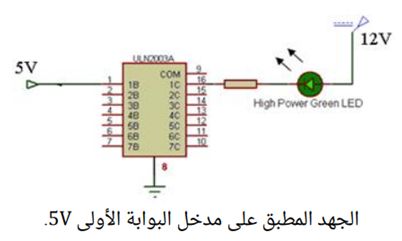
لإيضاح عمل بوابة دارة ULN2003 لندرس الحالتين التاليتين والتي سنتحكم فيها بثنائي ضوئي من خلال الجهد المطبق على مدخل البوابة الأولى.
1- بفرض أن الجهد المطبق على مدخل البوابة الأولى5V (High level) كما هو موضح في الشكل . عندئذ فإن خرج البوابة الأولى على الرجل 16 هو Low level) 0V). تبعا لذلك سيضيئ الثنائي الضوئي حيث عملت بوابة دائرة ULN2003 على تأمين مصب للتيار إلى الأرضي .
2- بفرض أن الجهد المطبق على مدخل البوابة الأولى Low level 0V كما هو موضح في الشكل . عندئذ فإن خرج البوابة الأولى على الرجل 16 هو ممانعة عالية high impedance. تبعا لذلك لن يضيء الثنائي الضوئي حيث لم يتم تأمين مصب للتيار.
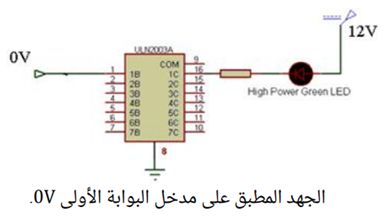
الجهد المطبق على الرجل 1 (مدخل البوابة الأولى) هو ((Low 0V و بالتالي الخرج على الرجل 16 (مخرج البوابة الأولى) هو High Z أي كأنها رجل عائمة . الثنائي الضوئي لا يعمل لأنه لم يتم تأمين مصب للتيار.
لا يمكن استخدام دارة ULN2003 مع المحرك المستمر لكي يتحرك باتجاهين وذلك لأنها تسمح بمرور التيار باتجاه واحد فقط وبالتالي فهي مناسبة للمحركات الخطوية أحادية القطبية.
التحكم بالمحرك الخطوي أحادي القطبية وسرعته من خلال لوحة الأردوينو
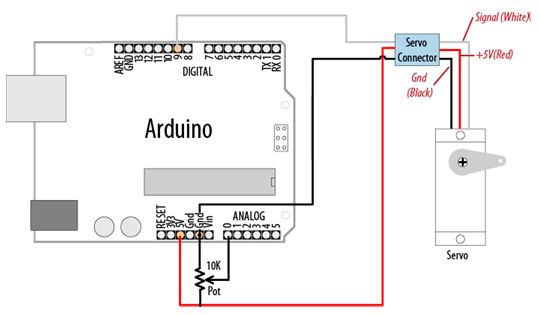
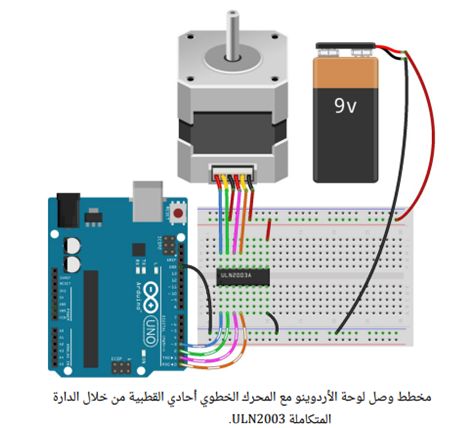
يبين الشكل أدناه مخطط التوصيل العملي للوحة الأردوينو مع دارة القيادة ULN2003 والمحرك الخطوي أحادي القطبية سداسي الأسلاك. تم ربط المنافذ 0,1,2,3 مع مداخل بوابات دارة ULN2003، والمخارج مع أربعة أسلاك للمحرك. السلكان المشتركان تم وصلهما إلى التغذية +9V . تم وصل الرجل 8 لدارة ULN2003 مع الأرضي، والرجل 9 إلى التغذية +9V وذلك للتخلص من الحقل الكهربائي المغناطيسي العودي. عند تطبيق +5V (1 منطقى) على المنافذ 0,1,2,3 سيكون خرج البوابات 0V مما يسمح بمرور تيار في ملفات المحرك، أما عند تطبيق 0V (0 منطقى) على المنافذ 0,1,2,3 سيكون خرج البوابات ممانعة عالية ولن يمر تيار في الملفات. يتم اختيار إحدى طرق تنشيط الملفات المذكورة سابقا (ملف واحد، خطوة كاملة، نصف خطوة) وبرمجة لوحة الأردوينو تبعل لذلك .
يتم التحكم بجهة دوران المحرك (مع أو عكس عقارب الساعة) من خلال ترتيب تنشيط الملفات الواحد تلو الآخر، ويتم التحكم بسرعة المحرك من خلال تغيير التأخير الزمني ما بين كل مرحلة من مراحل الدورة.
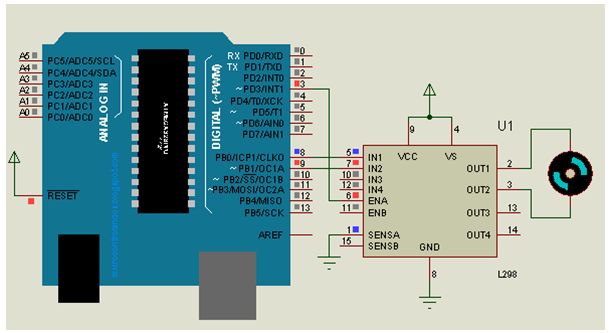
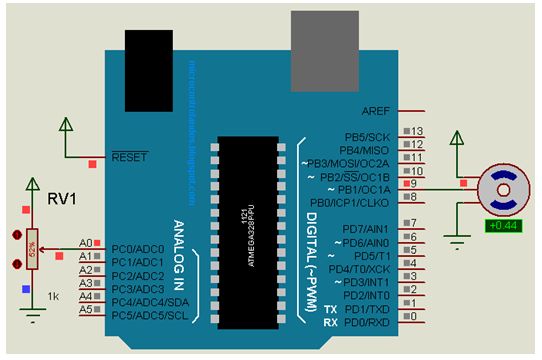
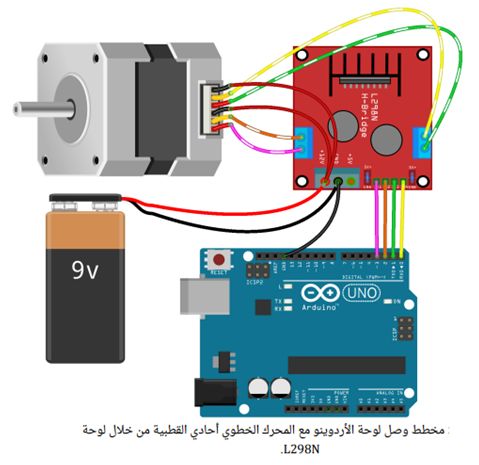
يبين الشكل أدناه مخطط التوصيل العملي للوحة الأردوينو مع لوحة L298N والمحرك الخطوي أحادي القطبية. تم ربط المنافذ 0,1,2,3 مع أرجل الدخل المنطقية للوحة (IN1,IN2,IN3,IN4) والمخارج (OUT1,OUT2,OUT3,OUT4) مع أربعة أسلاك للمحرك .
السلكان المشتركان للمحرك تم وصلهما إلى التغذية +9V تم المحافظة على الوصلة jumper) 7)، والوصلة jumper) 12) بحيث يتم تفعيل جميع المخارج. تم تزويد اللوحة بمنبع تغذية +9V على الرجل 4 والذي من خلاله يتم تغذية المحرك. تم المحافظة على الوصلة jumper) 3)، وهذا يعني أنه سيتم تفعيل منظم الجهد الداخلي للوحة +5V وبالتالي لا يوجد حاجة لتغذيتها بجهد +5V . إذا تم نز ع هذه الوصلة لابد من تأمين تغذية +5V على الرجل 6.
|

 عبدالله حجازى ( أعجبته المشاركة )
عبدالله حجازى ( أعجبته المشاركة )
 عريبى محمود ( شكر العضو على هذه المشاركة )
عريبى محمود ( شكر العضو على هذه المشاركة )