محركات التيار المستمر : DC MOTOR


المحركات بانواعها المختلفة هى المسئولة عن التحكم فى حركة الروبوت
وهى من اهم مكوناته ومهمة توفير محرك مناسب من اهم الاشياء قبل بناء الروبوت.
وسنتحدث باختصار عن محركات التيار المستمر والتى تتميز عن
باقى المحركات بالاتى:
1- التكلفة المنخفضة.
2- توفرها .
3- سهولة التحكم .
ويعاب عليها عدم الدقة.
نظرية العمل:
تعتمد على محركات التيار المستمر على الكهرومغنطيسية
فهى تقوم بتحويل
القدرة الكهربائية الى قدرة ميكانيكية (حركية) (استخدم GOOGLE
اذا اردت معرفة نظرية العمل بالتفاصيل هناك شرح كثير بالصور
يسهل فهم النظرية لم احب ان انقلها هنا حتى لا يتشعب الموضوع).
غالب هذه المحركات يكون دخلها عبارة قطبين موجب وسالب
يعتمد اتجاه حركة الموتور على على قطبية التوصيل .
المعادلات :
العلاقة بين الجهد الذى يغذى الموتور وسرعته علاقة طردية مباشرة
فكلما زاد الجهد زادت السرعة والعكس صحيح . اى ان
Speed=Kv*V……………………………………..(1)
Kv::: ثابت
V ::::: جهد الدائرة المتكاملة التى تتحكم فى الترانزسنور (غالبا 5 فولت).
لكن هذا القانون غير دقيق لان الموتور يحتوى على مقاومة داخلية R
هذه المقاومة تتسبب فى فقد فى الجهد مقداره (I*R) حسب قانون اوم
اذن القانون الامثل هو
Speed=Kv(V-I*R)……………………………………..(1)
اذن اذا كان لدينا موتور بالمواصفات التالية
Rated 12 V
Rated 120 Rpm
فاذا غذينا الموتور بجهد 12 فولت فالسرعة لن تكون 120 بل اقل من ذلك
بسبب الفقد فى الجهد.
ايضا العلاقة بين العزم Torque))(القوة التى تنتج دوران الموتور)
والتيار المسحوب علاقة طرية ايضا بمعنى كلما تتطلب الامر عزما
كبيرا زاد التيار المسحوب والعكس صحيح اى
Torque=Kt*I …………………………………….(2)
Kt::: ثابت
I ::: التيار المسحوب من المصدر
ولكن ليس كل التيار المسحوب من المصدر سيتسبب فى هذا العزم
هناك فقد فى القدرة سببه تيار اخر هو Io تيار اللاحمل هو التيار
المسحوب عندما لا يكون هناك عزم على الموتور او بمعنى اخر لا يوجد حمل.
وبنفس الطريقة القانون الامثل هو
Torque=Kt(I-Io) …………………………………….(2
سنحتاج الى هاتين المعادلتين اذا اردنا ان نتحكم فى الموتور.
تشغيل الموتور :
يمكن تشغيل الموتر بتوصيله بمصدر جهد مستمر بطارية مثلا.
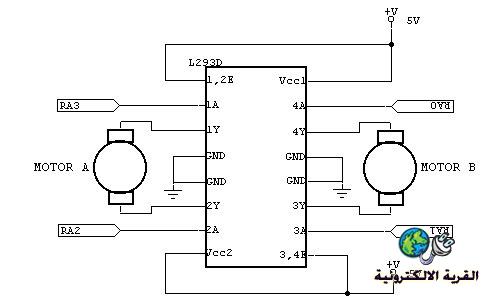
لكن سنهتم بتوصيله بالدوائر الرقمية مثل الميكروكنترولر
لان معظم الدوائر الرقمية لا تستطيع توفير تيار كافى لتشغيل
الموتور فلا يمكن ربط الموتور مباشرة . لابد من توصيل الموتور
بمصدر منفصل والتحكم فيه عن طريق مفتاح وهو هنا الترانزستور .
وهذه الدائرة تفى بالغرض
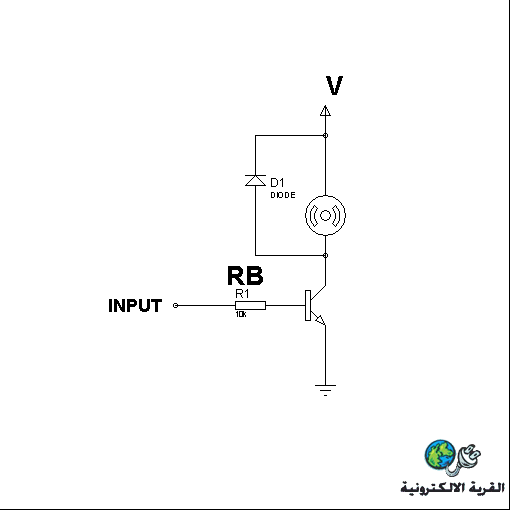 ما فائدة الدايود؟
ما فائدة الدايود؟
لان الموتور هو من الاحمال الحثية وهى بطبيعتها تمنع التغير السريع
فى التيار وهذا يحدث عند غلق المفتاح (جهد 0 على القاعدة) فان هذا
الاصرار يجعل الملف يولد جهد عالى يكفى لاستمرار مرور التيار ويكون هذا
الجهد معكوسا وسيمر التيار من خلال الدايود.
مواصفات الترانزستور:
يجب ان تتوفر فى الترانزستور المواصفات التالية:
اولا
Hfe(min)>(5*I)/25
I :::: تمثل التيار المسحوب ب mA
ثانيا
Ic (max)>I
اى ان اقصى تيار للمجمع يجب ان يكون اكبر من التيار المسحوب
بواسطة الموتور.
ثالثا
من نوع NPN.
رابعا
.RB=(V*hfe)/(5*I)
* I ::: تمثل التيار المسحوب بmA
V ::::: جهد تغذية الدائرة المتكاملة (غالبا 5 فولت).
RB :::: مقاومة القاعدة بالكيلو اوم.
مواصفات الدايود :
1- جهد اعلى من ضعف جهد المصدر .
2- تيار اعلى من اقصى تيار متوقع .
وتضاف خاصية اخرى اذا اردنا ان نتحكم فى سرعة الموتور باستخدام تقنية ال PWM وهى ان يكون :
3- من نوع fast recovery Diode
trr<200nsec
يتبع